Enabling Remote Operation of Offshore Equipment
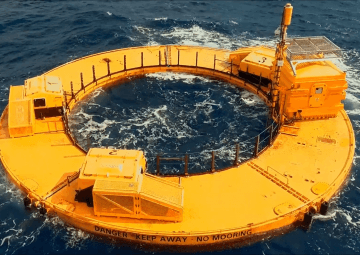
BOLT Sea Power’s current available product BOLT Lifesaver just returned to Europe following two deployments for the US Navy outside Marine Corps Base Hawaii, successfully demonstrating uptime and power production continuity unmatched by any other marine renewable power generation system.
Production data from the first deployment from 2016 to 2017 is below: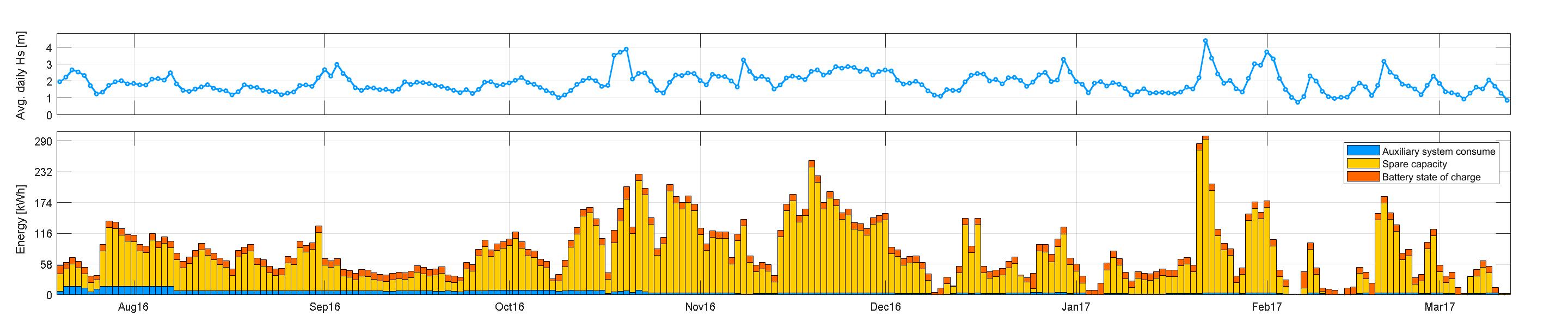
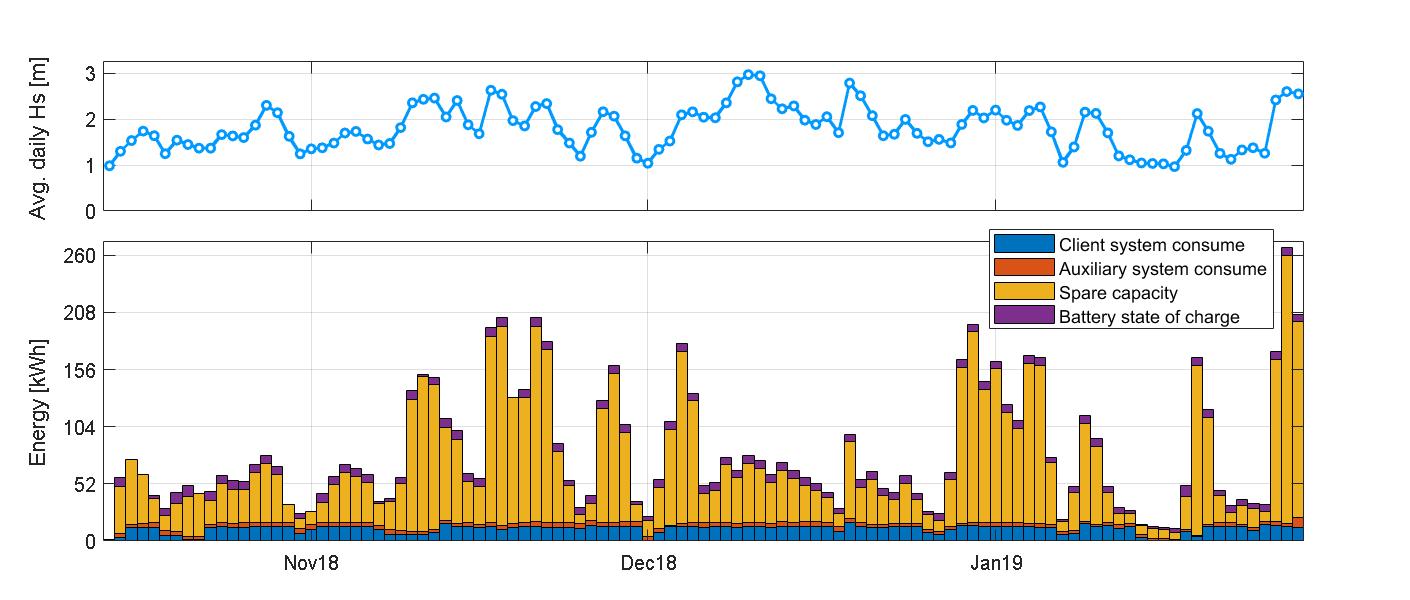
Bolt Lifesaver ocean sensor demonstration at the US Navy test site in Hawaii was completed as of Jan. 28th 2019 after 108 days of installation, 99.1% uptime and 8.000kWh of energy produced. Lifesaver will be recovered at first weather window for disassembly and return to Europe by June 2019. Day-by-day statistics summarized below:
 More data and information on our recent installation of BOLT Lifesaver at the US Navy test site in Hawaii
More data and information on our recent installation of BOLT Lifesaver at the US Navy test site in HawaiiFred. Olsen Ltd. has developed technology for conversion of ocean waves into electricity for more than sixteen years.
Since 2003, we have built and operated five different wave energy converters in three different countries. Accumulated over 64.000 hours of in-sea operation and 15.000 hours of energy production. These are world leading figures.
This has given us a firm understanding of the limitations and possibilities of wave generated electricity.
Building technical solutions brick by brick in collaboration with leading technology companies like Siemens and Gates Corporation, we have developed a low maintenance, high reliability power take-off technology for generation of electricity from ocean waves.
BOLT Sea Power offer buoys that provides a locally generated power supply for offshore and subsea equipment, in addition offering a reliable low latency communication line to shore for remote operation..